ಮಾಡ್ಯುಲೇಷನ್ ಎನ್ನುವುದು ರೇಖಾತ್ಮಕವಲ್ಲದ ವಿದ್ಯುತ್ ಪ್ರಕ್ರಿಯೆಯಾಗಿದ್ದು, ಇದರಲ್ಲಿ ಒಂದು ಸಿಗ್ನಲ್ (ವಾಹಕ) ನಿಯತಾಂಕಗಳನ್ನು ಮತ್ತೊಂದು ಸಿಗ್ನಲ್ (ಮಾಡ್ಯುಲೇಟಿಂಗ್, ಮಾಹಿತಿ) ಬಳಸಿ ಬದಲಾಯಿಸಲಾಗುತ್ತದೆ. ಸಂವಹನ ತಂತ್ರಜ್ಞಾನದಲ್ಲಿ, ಆವರ್ತನ, ವೈಶಾಲ್ಯ ಮತ್ತು ಹಂತದ ಮಾಡ್ಯುಲೇಶನ್ ಅನ್ನು ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ. ಪವರ್ ಎಲೆಕ್ಟ್ರಾನಿಕ್ಸ್ ಮತ್ತು ಮೈಕ್ರೊಪ್ರೊಸೆಸರ್ ತಂತ್ರಜ್ಞಾನದಲ್ಲಿ, ನಾಡಿ-ಅಗಲ ಮಾಡ್ಯುಲೇಷನ್ ವ್ಯಾಪಕವಾಗಿ ಹರಡಿದೆ.
ವಿಷಯ
PWM ಎಂದರೇನು (ಪಲ್ಸ್ ಅಗಲ ಮಾಡ್ಯುಲೇಶನ್)
ಮೂಲ ಸಂಕೇತದ ನಾಡಿ-ಅಗಲ ಮಾಡ್ಯುಲೇಷನ್ನೊಂದಿಗೆ, ಮೂಲ ಸಂಕೇತದ ವೈಶಾಲ್ಯ, ಆವರ್ತನ ಮತ್ತು ಹಂತವು ಬದಲಾಗದೆ ಉಳಿಯುತ್ತದೆ. ಆಯತಾಕಾರದ ನಾಡಿನ ಅವಧಿ (ಅಗಲ) ಮಾಹಿತಿ ಸಂಕೇತದ ಕ್ರಿಯೆಯ ಅಡಿಯಲ್ಲಿ ಬದಲಾವಣೆಗೆ ಒಳಪಟ್ಟಿರುತ್ತದೆ. ಇಂಗ್ಲಿಷ್ ತಾಂತ್ರಿಕ ಸಾಹಿತ್ಯದಲ್ಲಿ, ಇದನ್ನು PWM - ನಾಡಿ-ಅಗಲ ಮಾಡ್ಯುಲೇಶನ್ ಎಂದು ಸಂಕ್ಷಿಪ್ತಗೊಳಿಸಲಾಗಿದೆ.
PWM ಹೇಗೆ ಕೆಲಸ ಮಾಡುತ್ತದೆ
ನಾಡಿ ಅಗಲ ಮಾಡ್ಯುಲೇಟೆಡ್ ಸಿಗ್ನಲ್ ಎರಡು ರೀತಿಯಲ್ಲಿ ರೂಪುಗೊಳ್ಳುತ್ತದೆ:
- ಅನಲಾಗ್;
- ಡಿಜಿಟಲ್.
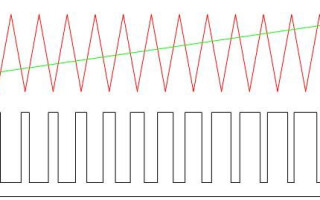
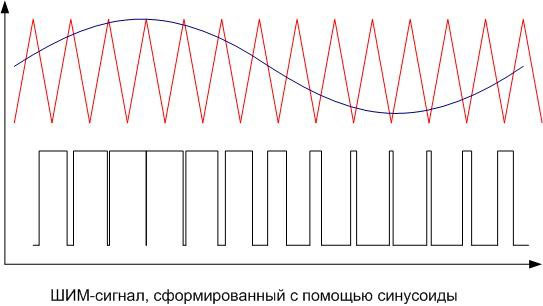
PWM ಸಿಗ್ನಲ್ ಅನ್ನು ರಚಿಸುವ ಅನಲಾಗ್ ವಿಧಾನದೊಂದಿಗೆ, ಗರಗಸದ ಅಥವಾ ತ್ರಿಕೋನ ಸಂಕೇತದ ರೂಪದಲ್ಲಿ ವಾಹಕವನ್ನು ವಿಲೋಮಕ್ಕೆ ನೀಡಲಾಗುತ್ತದೆ ಹೋಲಿಕೆದಾರ ಇನ್ಪುಟ್, ಮತ್ತು ಮಾಹಿತಿ - ಇನ್ವರ್ಟಿಂಗ್ ಅಲ್ಲದ ಮೇಲೆ. ತತ್ಕ್ಷಣದ ವಾಹಕದ ಮಟ್ಟವು ಮಾಡ್ಯುಲೇಟಿಂಗ್ ಸಿಗ್ನಲ್ಗಿಂತ ಹೆಚ್ಚಿದ್ದರೆ, ನಂತರ ಹೋಲಿಕೆದಾರನ ಔಟ್ಪುಟ್ ಶೂನ್ಯವಾಗಿರುತ್ತದೆ, ಕಡಿಮೆ ಇದ್ದರೆ - ಒಂದು. ಔಟ್ಪುಟ್ ಎನ್ನುವುದು ವಾಹಕ ತ್ರಿಕೋನ ಅಥವಾ ಗರಗಸದ ಆವರ್ತನಕ್ಕೆ ಅನುಗುಣವಾದ ಆವರ್ತನದೊಂದಿಗೆ ಪ್ರತ್ಯೇಕವಾದ ಸಂಕೇತವಾಗಿದೆ ಮತ್ತು ಮಾಡ್ಯುಲೇಟಿಂಗ್ ವೋಲ್ಟೇಜ್ನ ಮಟ್ಟಕ್ಕೆ ಅನುಗುಣವಾಗಿ ನಾಡಿ ಉದ್ದವಾಗಿದೆ.
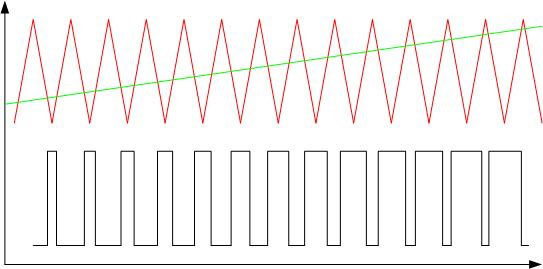
ಉದಾಹರಣೆಯಾಗಿ, ತ್ರಿಕೋನ ಸಂಕೇತದ ನಾಡಿ ಅಗಲ ಮಾಡ್ಯುಲೇಶನ್ ರೇಖೀಯವಾಗಿ ಹೆಚ್ಚುತ್ತಿದೆ. ಔಟ್ಪುಟ್ ಕಾಳುಗಳ ಅವಧಿಯು ಔಟ್ಪುಟ್ ಸಿಗ್ನಲ್ನ ಮಟ್ಟಕ್ಕೆ ಅನುಗುಣವಾಗಿರುತ್ತದೆ.
ಅನಲಾಗ್ PWM ನಿಯಂತ್ರಕಗಳು ಸಿದ್ಧ-ಸಿದ್ಧ ಮೈಕ್ರೊ ಸರ್ಕ್ಯೂಟ್ಗಳ ರೂಪದಲ್ಲಿ ಲಭ್ಯವಿವೆ, ಅದರೊಳಗೆ ಹೋಲಿಕೆದಾರ ಮತ್ತು ವಾಹಕ ಉತ್ಪಾದನೆಯ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಸ್ಥಾಪಿಸಲಾಗಿದೆ. ಬಾಹ್ಯ ಆವರ್ತನ-ಸೆಟ್ಟಿಂಗ್ ಅಂಶಗಳನ್ನು ಸಂಪರ್ಕಿಸಲು ಮತ್ತು ಮಾಹಿತಿ ಸಂಕೇತವನ್ನು ಪೂರೈಸಲು ಒಳಹರಿವುಗಳಿವೆ. ಶಕ್ತಿಯುತ ವಿದೇಶಿ ಕೀಗಳನ್ನು ನಿಯಂತ್ರಿಸುವ ಔಟ್ಪುಟ್ನಿಂದ ಸಂಕೇತವನ್ನು ತೆಗೆದುಹಾಕಲಾಗುತ್ತದೆ. ಪ್ರತಿಕ್ರಿಯೆಗಾಗಿ ಇನ್ಪುಟ್ಗಳು ಸಹ ಇವೆ - ಸೆಟ್ ನಿಯಂತ್ರಣ ನಿಯತಾಂಕಗಳನ್ನು ನಿರ್ವಹಿಸಲು ಅವು ಅಗತ್ಯವಿದೆ. ಉದಾಹರಣೆಗೆ, TL494 ಚಿಪ್ ಆಗಿದೆ. ಗ್ರಾಹಕರ ಶಕ್ತಿಯು ತುಲನಾತ್ಮಕವಾಗಿ ಚಿಕ್ಕದಾಗಿರುವ ಸಂದರ್ಭಗಳಲ್ಲಿ, ಅಂತರ್ನಿರ್ಮಿತ ಕೀಗಳನ್ನು ಹೊಂದಿರುವ PWM ನಿಯಂತ್ರಕಗಳು ಲಭ್ಯವಿದೆ. LM2596 ಮೈಕ್ರೊ ಸರ್ಕ್ಯೂಟ್ನ ಆಂತರಿಕ ಕೀಲಿಯನ್ನು 3 ಆಂಪಿಯರ್ಗಳವರೆಗೆ ಪ್ರಸ್ತುತಕ್ಕಾಗಿ ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ.
ವಿಶೇಷ ಮೈಕ್ರೊ ಸರ್ಕ್ಯೂಟ್ಗಳು ಅಥವಾ ಮೈಕ್ರೊಪ್ರೊಸೆಸರ್ಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಡಿಜಿಟಲ್ ವಿಧಾನವನ್ನು ಕೈಗೊಳ್ಳಲಾಗುತ್ತದೆ. ನಾಡಿ ಉದ್ದವನ್ನು ಆಂತರಿಕ ಕಾರ್ಯಕ್ರಮದಿಂದ ನಿಯಂತ್ರಿಸಲಾಗುತ್ತದೆ. ಜನಪ್ರಿಯ PIC ಮತ್ತು AVR ಸೇರಿದಂತೆ ಅನೇಕ ಮೈಕ್ರೊಕಂಟ್ರೋಲರ್ಗಳು PWM "ಬೋರ್ಡ್ನಲ್ಲಿ" ಹಾರ್ಡ್ವೇರ್ ಅನುಷ್ಠಾನಕ್ಕಾಗಿ ಅಂತರ್ನಿರ್ಮಿತ ಮಾಡ್ಯೂಲ್ ಅನ್ನು ಹೊಂದಿವೆ, PWM ಸಿಗ್ನಲ್ ಅನ್ನು ಸ್ವೀಕರಿಸಲು, ನೀವು ಮಾಡ್ಯೂಲ್ ಅನ್ನು ಸಕ್ರಿಯಗೊಳಿಸಬೇಕು ಮತ್ತು ಅದರ ಕಾರ್ಯಾಚರಣೆಯ ನಿಯತಾಂಕಗಳನ್ನು ಹೊಂದಿಸಬೇಕು.ಅಂತಹ ಮಾಡ್ಯೂಲ್ ಲಭ್ಯವಿಲ್ಲದಿದ್ದರೆ, PWM ಅನ್ನು ಸಾಫ್ಟ್ವೇರ್ ಮೂಲಕ ಸಂಪೂರ್ಣವಾಗಿ ಆಯೋಜಿಸಬಹುದು, ಇದು ಕಷ್ಟವೇನಲ್ಲ. ಈ ವಿಧಾನವು ಔಟ್ಪುಟ್ಗಳ ಹೊಂದಿಕೊಳ್ಳುವ ಬಳಕೆಯ ಮೂಲಕ ಹೆಚ್ಚಿನ ಶಕ್ತಿ ಮತ್ತು ಸ್ವಾತಂತ್ರ್ಯವನ್ನು ನೀಡುತ್ತದೆ, ಆದರೆ ಹೆಚ್ಚು ನಿಯಂತ್ರಕ ಸಂಪನ್ಮೂಲಗಳನ್ನು ಬಳಸುತ್ತದೆ.
PWM ಸಿಗ್ನಲ್ನ ಗುಣಲಕ್ಷಣಗಳು
PWM ಸಿಗ್ನಲ್ನ ಪ್ರಮುಖ ಗುಣಲಕ್ಷಣಗಳು:
- ವೈಶಾಲ್ಯ (U);
- ಆವರ್ತನ (ಎಫ್);
- ಡ್ಯೂಟಿ ಸೈಕಲ್ (ಎಸ್) ಅಥವಾ ಡ್ಯೂಟಿ ಸೈಕಲ್ ಡಿ.
ವೋಲ್ಟ್ಗಳಲ್ಲಿನ ವೈಶಾಲ್ಯವನ್ನು ಲೋಡ್ ಅನ್ನು ಅವಲಂಬಿಸಿ ಹೊಂದಿಸಲಾಗಿದೆ. ಇದು ಗ್ರಾಹಕರ ರೇಟ್ ಮಾಡಲಾದ ಪೂರೈಕೆ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಒದಗಿಸಬೇಕು.
ನಾಡಿ ಅಗಲದಿಂದ ಮಾಡ್ಯುಲೇಟೆಡ್ ಸಿಗ್ನಲ್ನ ಆವರ್ತನವನ್ನು ಈ ಕೆಳಗಿನ ಪರಿಗಣನೆಗಳಿಂದ ಆಯ್ಕೆ ಮಾಡಲಾಗಿದೆ:
- ಹೆಚ್ಚಿನ ಆವರ್ತನ, ಹೆಚ್ಚಿನ ನಿಯಂತ್ರಣ ನಿಖರತೆ.
- ಆವರ್ತನವು PWM ನಿಂದ ನಿಯಂತ್ರಿಸಲ್ಪಡುವ ಸಾಧನದ ಪ್ರತಿಕ್ರಿಯೆ ಸಮಯಕ್ಕಿಂತ ಕಡಿಮೆಯಿರಬಾರದು, ಇಲ್ಲದಿದ್ದರೆ ನಿಯಂತ್ರಿತ ಪ್ಯಾರಾಮೀಟರ್ನ ಗಮನಾರ್ಹ ತರಂಗಗಳು ಸಂಭವಿಸುತ್ತವೆ.
- ಹೆಚ್ಚಿನ ಆವರ್ತನ, ಹೆಚ್ಚಿನ ಸ್ವಿಚಿಂಗ್ ನಷ್ಟಗಳು. ಕೀಲಿಯ ಸ್ವಿಚಿಂಗ್ ಸಮಯವು ಸೀಮಿತವಾಗಿದೆ ಎಂಬ ಅಂಶದಿಂದ ಇದು ಉದ್ಭವಿಸುತ್ತದೆ. ಲಾಕ್ ಸ್ಥಿತಿಯಲ್ಲಿ, ಎಲ್ಲಾ ಪೂರೈಕೆ ವೋಲ್ಟೇಜ್ ಪ್ರಮುಖ ಅಂಶದ ಮೇಲೆ ಇಳಿಯುತ್ತದೆ, ಆದರೆ ಬಹುತೇಕ ಪ್ರಸ್ತುತ ಇಲ್ಲ. ತೆರೆದ ಸ್ಥಿತಿಯಲ್ಲಿ, ಪೂರ್ಣ ಲೋಡ್ ಪ್ರವಾಹವು ಕೀಲಿ ಮೂಲಕ ಹರಿಯುತ್ತದೆ, ಆದರೆ ವೋಲ್ಟೇಜ್ ಡ್ರಾಪ್ ಚಿಕ್ಕದಾಗಿದೆ, ಏಕೆಂದರೆ ಥ್ರೋಪುಟ್ ಪ್ರತಿರೋಧವು ಕೆಲವು ಓಮ್ಗಳು. ಎರಡೂ ಸಂದರ್ಭಗಳಲ್ಲಿ, ವಿದ್ಯುತ್ ವಿಸರ್ಜನೆಯು ಅತ್ಯಲ್ಪವಾಗಿದೆ. ಒಂದು ರಾಜ್ಯದಿಂದ ಇನ್ನೊಂದಕ್ಕೆ ಪರಿವರ್ತನೆ ತ್ವರಿತವಾಗಿ ಸಂಭವಿಸುತ್ತದೆ, ಆದರೆ ತಕ್ಷಣವೇ ಅಲ್ಲ. ಅನ್ಲಾಕಿಂಗ್-ಲಾಕಿಂಗ್ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ, ಒಂದು ದೊಡ್ಡ ವೋಲ್ಟೇಜ್ ಭಾಗಶಃ ತೆರೆದ ಅಂಶದ ಮೇಲೆ ಇಳಿಯುತ್ತದೆ ಮತ್ತು ಅದೇ ಸಮಯದಲ್ಲಿ ಗಮನಾರ್ಹವಾದ ಪ್ರವಾಹವು ಅದರ ಮೂಲಕ ಹರಿಯುತ್ತದೆ. ಈ ಸಮಯದಲ್ಲಿ, ಕರಗಿದ ಶಕ್ತಿಯು ಹೆಚ್ಚಿನ ಮೌಲ್ಯಗಳನ್ನು ತಲುಪುತ್ತದೆ. ಈ ಅವಧಿಯು ಚಿಕ್ಕದಾಗಿದೆ, ಕೀಲಿಯು ಗಮನಾರ್ಹವಾಗಿ ಬೆಚ್ಚಗಾಗಲು ಸಮಯ ಹೊಂದಿಲ್ಲ.ಆದರೆ ಪ್ರತಿ ಯುನಿಟ್ ಸಮಯದ ಅಂತಹ ಸಮಯದ ಮಧ್ಯಂತರಗಳ ಆವರ್ತನದ ಹೆಚ್ಚಳದೊಂದಿಗೆ, ಅದು ಹೆಚ್ಚು ಆಗುತ್ತದೆ ಮತ್ತು ಶಾಖದ ನಷ್ಟಗಳು ಹೆಚ್ಚಾಗುತ್ತವೆ. ಆದ್ದರಿಂದ, ಕೀಲಿಗಳನ್ನು ನಿರ್ಮಿಸಲು, ವೇಗದ ಅಂಶಗಳನ್ನು ಬಳಸುವುದು ಮುಖ್ಯವಾಗಿದೆ.
- ಚಾಲನೆ ಮಾಡುವಾಗ ವಿದ್ಯುತ್ ಮೋಟಾರ್ ಒಬ್ಬ ವ್ಯಕ್ತಿಗೆ ಕೇಳಬಹುದಾದ ಪ್ರದೇಶದಿಂದ ಆವರ್ತನವನ್ನು ತೆಗೆದುಕೊಳ್ಳಬೇಕು - 25 kHz ಮತ್ತು ಹೆಚ್ಚಿನದು. ಏಕೆಂದರೆ ಕಡಿಮೆ PWM ಆವರ್ತನದಲ್ಲಿ, ಅಹಿತಕರ ಸೀಟಿ ಸಂಭವಿಸುತ್ತದೆ.
ಈ ಅವಶ್ಯಕತೆಗಳು ಸಾಮಾನ್ಯವಾಗಿ ಪರಸ್ಪರ ಸಂಘರ್ಷದಲ್ಲಿರುತ್ತವೆ, ಆದ್ದರಿಂದ ಕೆಲವು ಸಂದರ್ಭಗಳಲ್ಲಿ ಆವರ್ತನದ ಆಯ್ಕೆಯು ರಾಜಿಯಾಗಿದೆ.
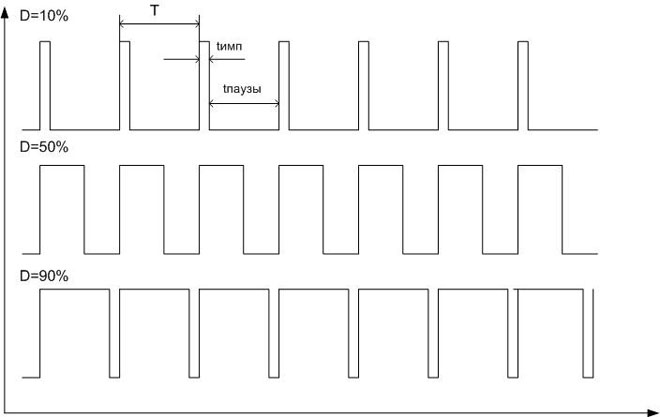
ಮಾಡ್ಯುಲೇಶನ್ ಮೌಲ್ಯವು ಕರ್ತವ್ಯ ಚಕ್ರವನ್ನು ನಿರೂಪಿಸುತ್ತದೆ. ನಾಡಿ ಪುನರಾವರ್ತನೆಯ ದರವು ಸ್ಥಿರವಾಗಿರುವುದರಿಂದ, ಅವಧಿಯ ಅವಧಿಯು ಸ್ಥಿರವಾಗಿರುತ್ತದೆ (T=1/f). ಅವಧಿಯು ಪ್ರಚೋದನೆ ಮತ್ತು ವಿರಾಮವನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ, ಕ್ರಮವಾಗಿ ಅವಧಿಯನ್ನು ಹೊಂದಿರುತ್ತದೆ, ಟಿಇಂಪ್ ಮತ್ತು ಟಿವಿರಾಮಗೊಳಿಸುತ್ತದೆ, ಮತ್ತು ಟಿಇಂಪ್+ಟಿವಿರಾಮಗೊಳಿಸುತ್ತದೆ=ಟಿ. ಕರ್ತವ್ಯ ಚಕ್ರವು ಅವಧಿಗೆ ನಾಡಿ ಅವಧಿಯ ಅನುಪಾತವಾಗಿದೆ - S \u003d tಇಂಪ್/ಟಿ. ಆದರೆ ಪ್ರಾಯೋಗಿಕವಾಗಿ ಇದು ಪರಸ್ಪರ ಮೌಲ್ಯವನ್ನು ಬಳಸಲು ಹೆಚ್ಚು ಅನುಕೂಲಕರವಾಗಿದೆ - ಫಿಲ್ ಫ್ಯಾಕ್ಟರ್: D=1/S=T/tಇಂಪ್. ಫಿಲ್ ಫ್ಯಾಕ್ಟರ್ ಅನ್ನು ಶೇಕಡಾವಾರು ಪ್ರಮಾಣದಲ್ಲಿ ವ್ಯಕ್ತಪಡಿಸಲು ಇದು ಹೆಚ್ಚು ಅನುಕೂಲಕರವಾಗಿದೆ.
PWM ಮತ್ತು SIR ನಡುವಿನ ವ್ಯತ್ಯಾಸವೇನು?
ವಿದೇಶಿ ತಾಂತ್ರಿಕ ಸಾಹಿತ್ಯದಲ್ಲಿ ನಾಡಿ-ಅಗಲ ಮಾಡ್ಯುಲೇಷನ್ ಮತ್ತು ಪಲ್ಸ್-ವಿಡ್ತ್ ರೆಗ್ಯುಲೇಷನ್ (PWR) ನಡುವೆ ಯಾವುದೇ ವ್ಯತ್ಯಾಸವಿಲ್ಲ. ರಷ್ಯಾದ ತಜ್ಞರು ಈ ಪರಿಕಲ್ಪನೆಗಳ ನಡುವೆ ವ್ಯತ್ಯಾಸವನ್ನು ಕಂಡುಹಿಡಿಯಲು ಪ್ರಯತ್ನಿಸುತ್ತಿದ್ದಾರೆ. ವಾಸ್ತವವಾಗಿ, PWM ಒಂದು ರೀತಿಯ ಮಾಡ್ಯುಲೇಶನ್ ಆಗಿದೆ, ಅಂದರೆ, ಇನ್ನೊಂದರ ಪ್ರಭಾವದ ಅಡಿಯಲ್ಲಿ ವಾಹಕ ಸಂಕೇತದಲ್ಲಿನ ಬದಲಾವಣೆಗಳು, ಒಂದನ್ನು ಮಾಡ್ಯುಲೇಟ್ ಮಾಡುತ್ತದೆ. ವಾಹಕ ಸಂಕೇತವು ಮಾಹಿತಿಯ ವಾಹಕವಾಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ ಮತ್ತು ಮಾಡ್ಯುಲೇಟಿಂಗ್ ಸಿಗ್ನಲ್ ಈ ಮಾಹಿತಿಯನ್ನು ಹೊಂದಿಸುತ್ತದೆ. ಮತ್ತು ಪಲ್ಸ್-ಅಗಲ ನಿಯಂತ್ರಣವು PWM ಅನ್ನು ಬಳಸುವ ಲೋಡ್ ಮೋಡ್ನ ನಿಯಂತ್ರಣವಾಗಿದೆ.
PWM ನ ಕಾರಣಗಳು ಮತ್ತು ಅನ್ವಯಗಳು
ನಾಡಿ ಅಗಲ ಮಾಡ್ಯುಲೇಷನ್ ತತ್ವವನ್ನು ಬಳಸಲಾಗುತ್ತದೆ ಶಕ್ತಿಯುತ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳ ವೇಗ ನಿಯಂತ್ರಕಗಳು. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಹೊಂದಾಣಿಕೆಯ ಆವರ್ತನ ಮಾಡ್ಯುಲೇಟಿಂಗ್ ಸಿಗ್ನಲ್ (ಏಕ-ಹಂತ ಅಥವಾ ಮೂರು-ಹಂತ) ಕಡಿಮೆ-ಶಕ್ತಿಯ ಸೈನ್ ವೇವ್ ಜನರೇಟರ್ನಿಂದ ಉತ್ಪತ್ತಿಯಾಗುತ್ತದೆ ಮತ್ತು ಅನಲಾಗ್ ರೀತಿಯಲ್ಲಿ ವಾಹಕದ ಮೇಲೆ ಅತಿಕ್ರಮಿಸುತ್ತದೆ. ಔಟ್ಪುಟ್ ಒಂದು PWM ಸಿಗ್ನಲ್ ಆಗಿದೆ, ಇದು ಅಗತ್ಯವಿರುವ ಶಕ್ತಿಯ ಕೀಗಳಿಗೆ ನೀಡಲಾಗುತ್ತದೆ. ನಂತರ ನೀವು ಕಡಿಮೆ-ಪಾಸ್ ಫಿಲ್ಟರ್ ಮೂಲಕ ದ್ವಿದಳ ಧಾನ್ಯಗಳ ಪರಿಣಾಮವಾಗಿ ಅನುಕ್ರಮವನ್ನು ರವಾನಿಸಬಹುದು, ಉದಾಹರಣೆಗೆ, ಸರಳ ಆರ್ಸಿ ಸರ್ಕ್ಯೂಟ್ ಮೂಲಕ, ಮತ್ತು ಮೂಲ ಸೈನುಸಾಯ್ಡ್ ಅನ್ನು ಆಯ್ಕೆ ಮಾಡಿ. ಅಥವಾ ನೀವು ಇಲ್ಲದೆ ಮಾಡಬಹುದು - ಇಂಜಿನ್ನ ಜಡತ್ವದಿಂದಾಗಿ ಶೋಧನೆಯು ಸ್ವಾಭಾವಿಕವಾಗಿ ಸಂಭವಿಸುತ್ತದೆ. ನಿಸ್ಸಂಶಯವಾಗಿ, ಹೆಚ್ಚಿನ ವಾಹಕ ಆವರ್ತನ, ಹೆಚ್ಚು ಔಟ್ಪುಟ್ ತರಂಗರೂಪವು ಮೂಲ ಸೈನುಸಾಯ್ಡ್ಗೆ ಹತ್ತಿರದಲ್ಲಿದೆ.
ನೈಸರ್ಗಿಕ ಪ್ರಶ್ನೆ ಉದ್ಭವಿಸುತ್ತದೆ - ಜನರೇಟರ್ನ ಸಿಗ್ನಲ್ ಅನ್ನು ತಕ್ಷಣವೇ ವರ್ಧಿಸುವುದು ಏಕೆ ಅಸಾಧ್ಯ, ಉದಾಹರಣೆಗೆ, ಶಕ್ತಿಯುತ ಟ್ರಾನ್ಸಿಸ್ಟರ್ಗಳನ್ನು ಬಳಸುವುದು? ಏಕೆಂದರೆ ರೇಖೀಯ ಕ್ರಮದಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ನಿಯಂತ್ರಕ ಅಂಶವು ಲೋಡ್ ಮತ್ತು ಕೀಲಿ ನಡುವೆ ಶಕ್ತಿಯನ್ನು ಮರುಹಂಚಿಕೆ ಮಾಡುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಪ್ರಮುಖ ಅಂಶದ ಮೇಲೆ ಗಮನಾರ್ಹವಾದ ಶಕ್ತಿಯು ವ್ಯರ್ಥವಾಗುತ್ತದೆ. ಶಕ್ತಿಯುತ ನಿಯಂತ್ರಣ ಅಂಶವು ಪ್ರಮುಖ ಕ್ರಮದಲ್ಲಿ (ಟ್ರಿನಿಸ್ಟರ್, ಟ್ರೈಯಾಕ್, ಆರ್ಜಿಬಿಟಿ ಟ್ರಾನ್ಸಿಸ್ಟರ್) ಕಾರ್ಯನಿರ್ವಹಿಸಿದರೆ, ನಂತರ ವಿದ್ಯುತ್ ಅನ್ನು ಕಾಲಾನಂತರದಲ್ಲಿ ವಿತರಿಸಲಾಗುತ್ತದೆ. ನಷ್ಟಗಳು ತುಂಬಾ ಕಡಿಮೆ ಇರುತ್ತದೆ, ಮತ್ತು ದಕ್ಷತೆಯು ಹೆಚ್ಚು ಇರುತ್ತದೆ.
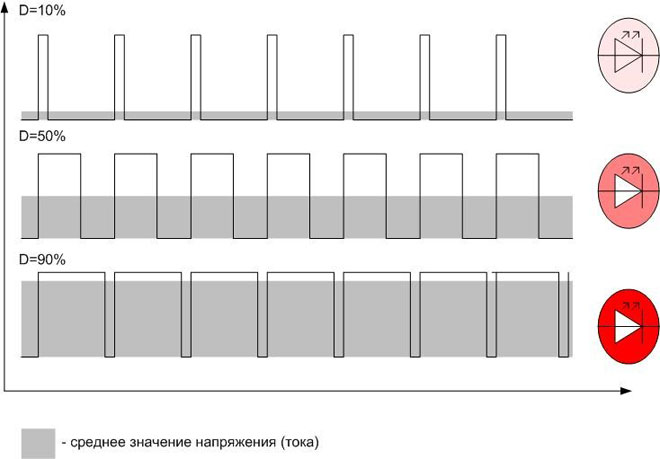
ಡಿಜಿಟಲ್ ತಂತ್ರಜ್ಞಾನದಲ್ಲಿ, ನಾಡಿ-ಅಗಲ ನಿಯಂತ್ರಣಕ್ಕೆ ಯಾವುದೇ ನಿರ್ದಿಷ್ಟ ಪರ್ಯಾಯವಿಲ್ಲ. ಸಿಗ್ನಲ್ ವೈಶಾಲ್ಯವು ಅಲ್ಲಿ ಸ್ಥಿರವಾಗಿರುತ್ತದೆ, ವೋಲ್ಟೇಜ್ ಮತ್ತು ಕರೆಂಟ್ ಅನ್ನು ನಾಡಿ ಅಗಲದ ಉದ್ದಕ್ಕೂ ವಾಹಕವನ್ನು ಮಾಡ್ಯುಲೇಟ್ ಮಾಡುವ ಮೂಲಕ ಮತ್ತು ತರುವಾಯ ಅದನ್ನು ಸರಾಸರಿ ಮಾಡುವ ಮೂಲಕ ಮಾತ್ರ ಬದಲಾಯಿಸಬಹುದು. ಆದ್ದರಿಂದ, ಪಲ್ಸ್ ಸಿಗ್ನಲ್ ಅನ್ನು ಸರಾಸರಿ ಮಾಡುವ ವಸ್ತುಗಳ ಮೇಲೆ ವೋಲ್ಟೇಜ್ ಮತ್ತು ಪ್ರವಾಹವನ್ನು ನಿಯಂತ್ರಿಸಲು PWM ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ಸರಾಸರಿ ವಿಭಿನ್ನ ರೀತಿಯಲ್ಲಿ ಸಂಭವಿಸುತ್ತದೆ:
- ಲೋಡ್ ಜಡತ್ವದಿಂದಾಗಿ.ಹೀಗಾಗಿ, ಥರ್ಮೋಎಲೆಕ್ಟ್ರಿಕ್ ಹೀಟರ್ಗಳು ಮತ್ತು ಪ್ರಕಾಶಮಾನ ದೀಪಗಳ ಉಷ್ಣ ಜಡತ್ವವು ನಿಯಂತ್ರಿತ ವಸ್ತುಗಳು ದ್ವಿದಳ ಧಾನ್ಯಗಳ ನಡುವಿನ ವಿರಾಮಗಳಲ್ಲಿ ಗಮನಾರ್ಹವಾಗಿ ತಣ್ಣಗಾಗದಿರಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ.
- ಗ್ರಹಿಕೆಯ ಜಡತ್ವದಿಂದಾಗಿ. ಎಲ್ಇಡಿ ನಾಡಿನಿಂದ ನಾಡಿಗೆ ಹೋಗಲು ಸಮಯವನ್ನು ಹೊಂದಿದೆ, ಆದರೆ ಮಾನವನ ಕಣ್ಣು ಇದನ್ನು ಗಮನಿಸುವುದಿಲ್ಲ ಮತ್ತು ವಿಭಿನ್ನ ತೀವ್ರತೆಯೊಂದಿಗೆ ನಿರಂತರ ಹೊಳಪು ಎಂದು ಗ್ರಹಿಸುತ್ತದೆ. ಎಲ್ಇಡಿ ಮಾನಿಟರ್ಗಳ ಚುಕ್ಕೆಗಳ ಹೊಳಪನ್ನು ನಿಯಂತ್ರಿಸಲು ಈ ತತ್ವವನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ಆದರೆ ನೂರಾರು ಹರ್ಟ್ಜ್ ಆವರ್ತನದೊಂದಿಗೆ ಅಗ್ರಾಹ್ಯ ಮಿಟುಕಿಸುವುದು ಇನ್ನೂ ಇರುತ್ತದೆ ಮತ್ತು ಕಣ್ಣಿನ ಆಯಾಸವನ್ನು ಉಂಟುಮಾಡುತ್ತದೆ.
- ಯಾಂತ್ರಿಕ ಜಡತ್ವದಿಂದಾಗಿ. ಈ ಆಸ್ತಿಯನ್ನು ಬ್ರಷ್ಡ್ ಡಿಸಿ ಮೋಟಾರ್ಗಳ ನಿಯಂತ್ರಣದಲ್ಲಿ ಬಳಸಲಾಗುತ್ತದೆ. ನಿಯಂತ್ರಣದ ಸರಿಯಾಗಿ ಆಯ್ಕೆಮಾಡಿದ ಆವರ್ತನದೊಂದಿಗೆ, ಮೋಟಾರು ಸತ್ತ ವಿರಾಮಗಳಲ್ಲಿ ನಿಧಾನಗೊಳಿಸಲು ಸಮಯವನ್ನು ಹೊಂದಿಲ್ಲ.
ಆದ್ದರಿಂದ, ವೋಲ್ಟೇಜ್ ಅಥವಾ ಪ್ರಸ್ತುತದ ಸರಾಸರಿ ಮೌಲ್ಯವು ನಿರ್ಣಾಯಕ ಪಾತ್ರವನ್ನು ವಹಿಸುತ್ತದೆ ಅಲ್ಲಿ PWM ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ಉಲ್ಲೇಖಿಸಲಾದ ಸಾಮಾನ್ಯ ಪ್ರಕರಣಗಳ ಜೊತೆಗೆ, PWM ವಿಧಾನವು ವೆಲ್ಡಿಂಗ್ ಯಂತ್ರಗಳು ಮತ್ತು ಬ್ಯಾಟರಿ ಚಾರ್ಜರ್ಗಳಲ್ಲಿ ಸರಾಸರಿ ಪ್ರವಾಹವನ್ನು ನಿಯಂತ್ರಿಸುತ್ತದೆ.
ಸ್ವಾಭಾವಿಕ ಸರಾಸರಿ ಸಾಧ್ಯವಾಗದಿದ್ದರೆ, ಅನೇಕ ಸಂದರ್ಭಗಳಲ್ಲಿ ಈ ಪಾತ್ರವನ್ನು ಈಗಾಗಲೇ ಉಲ್ಲೇಖಿಸಲಾದ ಲೋ-ಪಾಸ್ ಫಿಲ್ಟರ್ (ಲೋ-ಪಾಸ್ ಫಿಲ್ಟರ್) ವಹಿಸಿಕೊಳ್ಳಬಹುದು.LPF) ಆರ್ಸಿ ಸರಪಳಿಯ ರೂಪದಲ್ಲಿ. ಪ್ರಾಯೋಗಿಕ ಉದ್ದೇಶಗಳಿಗಾಗಿ, ಇದು ಸಾಕು, ಆದರೆ ಅಸ್ಪಷ್ಟತೆ ಇಲ್ಲದೆ ಕಡಿಮೆ-ಪಾಸ್ ಫಿಲ್ಟರ್ ಅನ್ನು ಬಳಸಿಕೊಂಡು PWM ನಿಂದ ಮೂಲ ಸಿಗ್ನಲ್ ಅನ್ನು ಪ್ರತ್ಯೇಕಿಸಲು ಅಸಾಧ್ಯವೆಂದು ಅರ್ಥಮಾಡಿಕೊಳ್ಳಬೇಕು. ಎಲ್ಲಾ ನಂತರ, PWM ಸ್ಪೆಕ್ಟ್ರಮ್ ಅನಂತ ಸಂಖ್ಯೆಯ ಹಾರ್ಮೋನಿಕ್ಸ್ ಅನ್ನು ಹೊಂದಿರುತ್ತದೆ ಅದು ಅನಿವಾರ್ಯವಾಗಿ ಫಿಲ್ಟರ್ನ ಪಾಸ್ಬ್ಯಾಂಡ್ಗೆ ಬೀಳುತ್ತದೆ. ಆದ್ದರಿಂದ, ಪುನರ್ನಿರ್ಮಾಣದ ಸೈನುಸಾಯಿಡ್ನ ಆಕಾರದ ಬಗ್ಗೆ ಭ್ರಮೆಗಳನ್ನು ನಿರ್ಮಿಸಬಾರದು.
ಅತ್ಯಂತ ಪರಿಣಾಮಕಾರಿ ಮತ್ತು ಪರಿಣಾಮಕಾರಿ PWM RGB ಎಲ್ಇಡಿ ನಿಯಂತ್ರಣ. ಈ ಸಾಧನವು ಮೂರು p-n ಜಂಕ್ಷನ್ಗಳನ್ನು ಹೊಂದಿದೆ - ಕೆಂಪು, ನೀಲಿ, ಹಸಿರು.ಪ್ರತಿ ಚಾನಲ್ನ ಹೊಳಪಿನ ಹೊಳಪನ್ನು ಪ್ರತ್ಯೇಕವಾಗಿ ಬದಲಾಯಿಸುವ ಮೂಲಕ, ನೀವು ಎಲ್ಇಡಿ ಗ್ಲೋನ ಯಾವುದೇ ಬಣ್ಣವನ್ನು ಪಡೆಯಬಹುದು (ಶುದ್ಧ ಬಿಳಿಯನ್ನು ಹೊರತುಪಡಿಸಿ). PWM ನೊಂದಿಗೆ ಬೆಳಕಿನ ಪರಿಣಾಮಗಳನ್ನು ರಚಿಸುವ ಸಾಧ್ಯತೆಗಳು ಅಂತ್ಯವಿಲ್ಲ.
ಪಲ್ಸ್ ಅಗಲ ಮಾಡ್ಯುಲೇಟೆಡ್ ಡಿಜಿಟಲ್ ಸಿಗ್ನಲ್ನ ಅತ್ಯಂತ ಸಾಮಾನ್ಯವಾದ ಅನ್ವಯವೆಂದರೆ ಲೋಡ್ ಮೂಲಕ ಹರಿಯುವ ಸರಾಸರಿ ಪ್ರಸ್ತುತ ಅಥವಾ ವೋಲ್ಟೇಜ್ ಅನ್ನು ನಿಯಂತ್ರಿಸುವುದು. ಆದರೆ ಈ ರೀತಿಯ ಮಾಡ್ಯುಲೇಶನ್ನ ಪ್ರಮಾಣಿತವಲ್ಲದ ಬಳಕೆಯು ಸಹ ಸಾಧ್ಯವಿದೆ. ಇದು ಎಲ್ಲಾ ಡೆವಲಪರ್ನ ಕಲ್ಪನೆಯ ಮೇಲೆ ಅವಲಂಬಿತವಾಗಿರುತ್ತದೆ.
ಇದೇ ರೀತಿಯ ಲೇಖನಗಳು: